هزاران معدن زیر آب رفته در اروپا وجود دارد که میتواند ارزش صنعتی داشته باشد. اما چگونه میتوان ارزش بودن آنها و یا تشکیل معادن جدید زیر آب را تشخیص داد؟ ربات کاوشگر معدن، پروژهای با سرمایهگذاری اتحادیه اروپا است میتواند در این زمینه کارآمد باشد.
تاریخ انتشار :شنبه ۶ بهمن ۱۳۹۷ ساعت ۰۲:۰۰
کد مطلب : 79807

یوسی التونن، مهندس مکاترونیک (مکانیک و الکترونیک) دانشگاه تامپر فنلاند درباره این پروژه میگوید: «ما میخواهیم معادن زیر آب رفته را بررسی کنیم. معادنی که نه به دلیل تمام شدن مواد معدنی بلکه به دلایل اقتصادی رها شدهاند و ممکن است هنوز مواد معدنی ارزشمند یا مواد معدنی جدید در آنها وجود داشته باشد.»
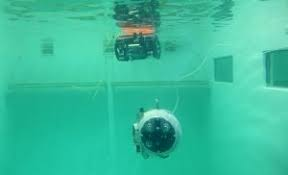
این پروژه نتیجه تلاش تیمی بینالمللی با سرمایهگذاری اتحادیه اروپا است. دانشمندان این پروژه رباتی کوچک و کرهای شکل با قطر ۶۰ سانتیمتر را با اخرین فناوریهای روز همراه کردهاند. رباتی که در برابر فشار ۵۰۰ متری عمق آب هم مقاوم است.
نوربرت زوزون، هماهنگ کننده پروژه و استاد معدن و جغرافیای دانشگاه میشکولتس مجارستان درباره پروژه «یونکسماین» میگوید: «این ربات میتواند زمان بیشتر را نسبت به غواصان زیر آب بگذراند. این زمان به ۵ ساعت میرسد و به مکانهایی میرود که غواصان امکان رفتن به آن را ندارند؛ زیرا نیازی به سیستم پشتیبانی حیات نیست و تنها به نیروی الکتریسیته نیاز دارد.»
مطالعات میدانی در طبیعت نشان میدهد که ربات کاوشگر تا چه اندازه در محیطهای کنترل نشده کارآمد است. هدف کوتاه مدت این است که این ربات، کاملا خودگردان وارد دالانهای غار شود و از مواد معدنی نمونه برداری کند.
دستگاههای فاصلهیاب صوتی، لیزر، دوربینها و سنسورها به این ربات کمک میکنند تا اطراف خود را تشخیص داده و جهتیابی کند. این دستگاهها انرژی لازم را از یک باطری قوی متحرک درونی تهیه میکنند که مرکز گرانش این ربات را نیز در صورت نیاز تغییر میدهد.
آلفرد مارتینز، پژوهشگر ربات و سیستمهای خودگران میگوید: «درون ربات، کامپیوتری با کارآیی بالا وجود دارد که تهیهاش در این ابعاد تا چند سال پیش ناممکن بود. ما لیزرها و دستگاههای دیگر را خودمان طراحی کردیم که دستمان را در موارد مختلف مانند کوچکسازی اجزاء بازتر کرد.»
بیشتر بخوانید: چالش های جدی برای اکوسیستم آبی

یک مرکز فناوری در پرتغال امکانات آزمایشگاهی مناسب را برای تست ربات کاوشگر معدن در اختیار پژوهشگران قرار میدهد. در استخر این مرکز با عمق ۵ متر میتوان کارکرد این ربات را در شرایط کنترل شده ارزیابی کرد.
رباتهای کاوشگر میتوانند در صنعت معدن و شرایط اضطراری معادن بسیار کارآمد باشد. توسعه دهندگان این پروژه قصد دارند آن را برای مقاصد تجاری و ارزیابی آزمایش کنند و تا همیجا هم با استقبال روبرو شدهاند.
نوربرت زوزون، مدیر هماهنگ کننده پروژه«یونکسماین» میگوید: «اخیرا مشکلی زیست محیطی برای یک معدن نمک در اوکراین به وجود آمده است و از ما خواستهاند تا به محض به ثمر رسیدن پروژه به آنجا برویم و دلیل ریزش معدن را پیدا کنیم؛ زیرا برای کاوشگر انسانی محیطی بسیار خطرناک است.»
طراحی روباتهای زیر آبی خودسامان در تالابهای ونیزمحققان اروپایی روباتهای ماهی نما طراحی کرده اند که قادرند زیر آب با یکدیگر ارتباط برقرار کنند. در طراحی این روباتها از بیومیمتیک، یعنی تقلید از رفتار حیوانات الهام گرفته شده است. این روباتها اطلاعاتی را جمع آوری و به سطح آب می فرستد که برای ارزیابی و حفاظت از محیط زیست تالابهای ونیز به کار می آید.
دانشمندان طرحی تحقیقاتی در اروپا یک روبات ماهی نما، یک روبات صدف نما و روباتی شبیه نیلوفر دریایی طراحی کرده اند که می توانند زیر آب با یکدیگر ارتباط برقرار کرده و اطلاعات را رد و بدل کنند.
این سه روبات وجه اشتراک دیگری هم دارند: سیستم ارتباطی و سخت افزار آنها با الهام از عناصر طبیعت طراحی شده است.
طراحی این روباتهای زیر آبی در قالب طرحی اروپایی موسوم به «سابکولترون» انجام می شود. هدف «سابکولترون» این است که انبوه روباتها بتوانند طولانی مدت، زیر آب بطور مستقل عمل کنند.
بیشتر بخوانید: شبیه سازی زیستی در بیوتکنولوژی با الگوبرداری از طبیعت طراحی روبات بر اساس الگوی خودسازماندهی حیوانات اجتماعی در طبیعتهدف محققان اروپایی این بوده که گروه روباتهای قوی و انعطاف پذیری طراحی کنند. بطوریکه این روباتها قادر باشند خود را سازماندهی کنند. این روباتها براساس دانش موسوم به «بیومیمیتیک» ( زیست تقلید) طراحی شده اند. به این معنی که در سیستم ارتباطی و سخت افزارهای آنها از الگوی رفتاری حیوانات اجتماعی الهام گرفته شده است.
آلکساندر کامپو، متخصص علوم کامپیوتر از دانشگاه آزاد بروکسل که با این طرح همکاری می کند، می گوید: «در آزمایشگاه رفتارحیوانات اجتماعی را مورد مطالعه قرار می دهیم و سازمانی را که در قلمرو، این حیوانات تشکیل می شود، بررسی کنیم. این تشکیلات فقط بر اساس سلسله مراتب شکل نمی گیرد، بلکه برخی از حیوانات قادرند با هم ارتباط برقرار کنند که به آن «خود سازماندهی» می گوییم. در وهله اول سعی می کنیم الگوی رفتارهای اجتماعی در طبیعت را درک کنیم و سپس با ساخت مدلهایی مبتنی بر معادلات ریاضی این الگوهای رفتاری را در روباتها بازسازی می کنیم.»
 برقراری ارتباط از طریق حس ششم الکتریکیاین روباتها قادرند اطلاعات را زیر آب جمع و آوری و به سطح آب بفرستند. اما این سه روبات زیر آبی چگونه کار می کنند؟ تا چه حد می توانند زیر آب با هم ارتباط برقرار کنند؟
برقراری ارتباط از طریق حس ششم الکتریکیاین روباتها قادرند اطلاعات را زیر آب جمع و آوری و به سطح آب بفرستند. اما این سه روبات زیر آبی چگونه کار می کنند؟ تا چه حد می توانند زیر آب با هم ارتباط برقرار کنند؟چالش اصلی دانشمندان در این طرح، سیستمهای ارتباطی است چون زیر آب اینترنت بدون سیم و فناوری «جی پی اس» کار نمی کند. البته مسئول هماهنگ کننده این طرح می گوید، چالشهای دیگری هم هست:
توماس اشمیکل، زیست شناس از دانشگاه گراتس در اتریش که مسئول هماهنگ کننده این طرح هم هست درباره اینکه روباتها برای ارتباط در زیر آب از چه فناوری استفاده می کنند، می گوید: «برای برقراری ارتباط، خودمان فناوریهایی طراحی کرده و ساخته ایم. برای مثال در این روبات صدف نما حسی به وجود آورده ایم که در برخی از ماهیهای افریقا و امریکای جنوبی، در اثر تکامل به وجود آمده است. این حس می تواند میدان های الکتریکی در طبیعت را تشخیص دهد.روبات های ما هم می توانند با ایجاد میدان الکتریکی در آبهای متلاطم و نیز با یکدیگر ارتباط برقرار و محیط را رصد کنند و نسبت به تغییرات محیط زیر آب واکنش نشان دهند.»
انرژی روباتها زیر آب چگونه تامین می شود؟این روباتها را می توان طوری برنامه ریزی کرد که ساعت ها تا ماه ها زیر آب مستقل عمل کنند. بنابراین دانشمندان باید راههایی خلاقانه پیدا می کردند تا روباتها بتوانند انرژی مورد نیاز خود را زیر آب تأمین کنند.
چزاره استفانینی، مهندس مکاترونیک از انستیتو تحقیقات پیشرفته زیست روباتها موسوم به «سانتانا» در ایتالیا می گوید برای تامین انرژی روباتها باید از روشهایی استفاده می کردند که منجر به زنگ زدگی یا نشت آب در داخل روبات نشود. او می افزاید: « این روباتها وقتی از زیر آب بیرون می آیند، قادرند با نزدیک شدن به یک کشتی یا یک ایستگاه انرژی، به روش القایی و بدون نیاز به کابل شارژ شوند. به این ترتیب می توان انرژی روبات را تامین کرد بدون اینکه نیاز باشد در آن را باز کنیم ، یا کارهایی دیگر که منجر به زنگ زدگی یا نشت آب می شود.»
 مدیریت محیط زیستحسگرهایی که در این روباتها تعبیه شده، قادرند گیاهان و جانواران زیر آب و همچنین تاثیر فعالیتهای صنعتی و گردشگری بر اکوسیستم پیچیده و شکننده زیر تالابهای ونیز را زیر نظر بگیرند.
مدیریت محیط زیستحسگرهایی که در این روباتها تعبیه شده، قادرند گیاهان و جانواران زیر آب و همچنین تاثیر فعالیتهای صنعتی و گردشگری بر اکوسیستم پیچیده و شکننده زیر تالابهای ونیز را زیر نظر بگیرند.پیرپائولو ککامپوسترینی، مهندس برق و مدیر موسسه «کورلیا» که با این طرح همکاری می کند می گوید: «مثلا روبات ما می تواند مدتی روی بستر دریا بماند و به محض اینکه حس کند فشار آب در اثر عبور قایق تغییر کرده است فعال شود. پس از آن می تواند به دقت ارتفاع موجی را که قایق ایجاد کرده است اندازه بگیرد. این اندازه گیری برای فهم تأثیر عبور قایق ها بر محیط زیست، بسیار مفید است. بر اساس این اطلاعات می توان مثلاً با تعیین حداکثر سرعت مجاز و ایجاد محدودیت های ترافیکی، مدیریت محیط زیست را دقیقتر کرد.»
رباتهای زیردریایی هوشمند اکتشافات اعماق آبها را متحول میکند رباتهای زیر دریایی امروز کاربردهای زیادی در صنایع و علوم دریایی و بویژه در اکتشافات دریایی دارند. محققان اروپایی می خواهند با طراحی این روباتها در اکتشافات دریایی تحول بزرگی ایجاد کنند. این طرح «فناوری سونار زیر آب با قابلیت تغییر مقیاس گسترده» نام دارد.
سیستمی که محققان اروپایی این طرح بکار می برند، شامل انبوه روبات های پیچیده مجهز به هیدروفون و حسگر است که زیر آب کار می کنند و می توانند به صورت انبوه مرتبط به هم کار و با فناوری سونار کف دریا را بررسی کنند.
بیشتر بخوانید: تشخیص بیماری از درون بدن با نانو ربات جلبکی انبوه ربات ها زیر آب، آرایه صوتی هوشمند می سازندمحققان طرح «فناوری سونار زیر آب با قابلیت تغییر مقیاس گسترده» مشغول آزمایش نمونه اولیه یکی از سیستمهای روباتیک هستند. این سیستم شامل دو جسم شناور کوچک و تعداد زیادی روباتهای زیر دریایی مجهز به دهها کامپیوتر، آب لرزهیاب (هیدروفون) برای دریافت موج های لرزه ای در آب و سونار برای فاصلهیابی صوتی زیر آب هستند.
البرت کلهولت مهندس الکترونیک این طرح می گوید: «صدای "تیک تیک" که می شنوید پالسهای الکتریکی هستند. تعداد زیادی الکترود در آب هست که ۱۰ سانتیمتر از یکدیگر فاصله دارند. روی جسمهای شناور باتریهای کوچک دو کیلوواتی قرار دادیم که موجهای صوتی (سونار) را ایجاد میکند. پالس سونارها در اعماق آب نفوذ می کند و در اثر برخورد با کف دریا منعکس میشود. هیدروفونها صداها را ضبط می کند. با تجزیه و تحلیل کامپیوتری این صداها و با کمک بازتابها میتوانیم لایههای کف دریا را ببینیم و شناسایی کنیم.»
این روباتهای زیرآبی برای این طراحی شده اند تا زیر آب آرایهای آکوستیک (صوتی) بسازند که هوشمند، قابل کنترل و گسترده با قابلیت شکل گیری مجدد است.
محققان با تجزیه و تحلیل کامپیوتری موجهای صوتی لایه های کف دریا را می بینند
چالش اصلی، تعامل روباتها با یکدیگر زیر آب استمحققان می خواهند انبوه روباتها زیر آب با یکدیگر تعامل داشته و اطلاعات را با هم ردوبدل کنند
لویس سباستیاو مهندس الکترونیک دانشگاه لیسبون که با طرح «فناوری سونار زیر آب با قابلیت تغییر مقیاس گسترده» همکاری می کند، می گوید: «یکی از اهداف ما در این طرح این بود که بیشترین تعداد ممکن از روباتهای زیردریایی را در این مجموعه داشته باشیم. بر اساس ساعتهای اتمی این کار را انجام می دهیم. هریک از روباتها به ساعت اتمی مجهز است. این کار چند سال پیش غیر ممکن بود. این ساعتهای اتمی به روباتها امکان می دهد تا بدون مشکل زیر آب حرکت کنند. چالش بعدی ما این است که این روباتها حین حرکت باید با یکدیگر هماهنگ باشند. مکانیاب به ما آنها امکان می دهد موقعیتشان را تشخیص بدهند.»
بیشتر بخوانید: ابداع رباتهای کوچکی که با رطوبت کار میکنند مزیت بزرگ این طرح، انعطاف پذیری روباتهای زیردریایی استدر فناوریهای که در حال حاضر برای اکتشاف با سونار وجود دارد به کشتیهای بزرگ، چشمههای صوتی قوی و تجهیزات گرانقیمت نیاز هست. در نتیجه عملیات به کندی پیش می رود و بسیار پرهزینه است.
اما طرح اروپایی چه مزیتهایی دارد؟ جوانی ایندیوری، محقق مهندسی کنترل و مسئول هماهنگ کننده طرح «فناوری سونار زیر آب با قابلیت تغییر مقیاس گسترده» می گوید: «این رباتها می تواند بسته به نیاز شکل خاصی به خود بگیرند. از آنجا که سیستم جمع آوری داده ها اساسا مثل یک آنتن عمل می کند انعطاف پذیری این روباتها یک مزیت بزرگ به شمار می آید زیرا مکانیزم دریافت سیگنالها را بهینه می کند.»
رباتهای زیر دریایی امروز کاربردهای زیادی در صنایع و علوم دریایی و بویژه در اکتشافات دریایی دارند. محققان اروپایی می خواهند با طراحی این روباتها در اکتشافات دریایی تحول بزرگی ایجاد کنند. این طرح «فناوری سونار زیر آب با قابلیت تغییر مقیاس گسترده» نام دارد.
سیستمی که محققان اروپایی این طرح بکار می برند، شامل انبوه روبات های پیچیده مجهز به هیدروفون و حسگر است که زیر آب کار می کنند و می توانند به صورت انبوه مرتبط به هم کار و با فناوری سونار کف دریا را بررسی کنند.
محققان با تجزیه و تحلیل کامپیوتری موجهای صوتی لایه های کف دریا را می بینند
 اکتشافات لرزه نگاری و کاوش نفت و گاز کف دریا با رباتهای زیردریاییبه گفته دانشمندان این طرح این فناوری قابل استفاده در نقشه برداری سه بعدی دریایی است و برای اکتشافات لرزه نگاری و تشخیص ویژگیهای کف دریاها به کار میرود.
اکتشافات لرزه نگاری و کاوش نفت و گاز کف دریا با رباتهای زیردریاییبه گفته دانشمندان این طرح این فناوری قابل استفاده در نقشه برداری سه بعدی دریایی است و برای اکتشافات لرزه نگاری و تشخیص ویژگیهای کف دریاها به کار میرود.لوران دولون مدیر نوآوریهای زیردریایی شرکت «خدمات نفت و گاز فرانسوی» (سی جی جی) و از محققان این طرح در این باره که این فناوری در چه حوزه هایی کاربرد دارد، می گوید: «می توانیم از آن در ساخت و ساز یا نصب تجهیزات نظارتی زیرآب استفاده کرد. در مقیاس بزرگتر برای کاوش مواد معدنی، نفت و گازِ کف دریا به کار می رود.»
محققان می گویند که کاربردهای دیگر شامل عملیات جستجو و نجات، خبرگیری از محیط زیست، عملیات تجسس، یافتن مکان نشت نفت، ماهی گیری و باستان شناسی زیر دریا است.
کاربرد ربات ها در اعماق دریاها و رودخانه هاربات ها در زیر آب می توانند با هماهنگی و کار مشترک به کشف عمق دریاها و رودخانه ها و حل مسائل آنها بسیار کمک کنند. اما چگونه می توان کار با این ربات ها را سازمان داد؟
مهندسان بر روی یک طرح اروپایی در بندر پورتو در کشور پرتغال به نام «طلوع» کار می کنند که مربوط به زیردریایی های کوچک بدون سرنشین و چگونگی ارتباط آنها با یکدیگر از طریق علائم صوتی است.
شیارا پتریولی، استاد علوم کامپیوتر و هماهنگ کننده این طرح می گوید: “آنچه اینجا می بینید ربات های مخصوص زیر آب اند که می توانند با همدیگر ارتباط بگیرند و همکاری کنند. یعنی ایجاد نوعی شبکه اینترنت بین اشیا و فضاهای زیر آب. این در حقیقت طرح جدیدی است که اجازه می دهد دستگاه های مختلف مانند حسگرها و ربات ها به تبادل اطلاعات با هم بپردازند و این راه های جدیدی را برای کنترل اقیانوس ها، دریاچه ها و رودخانه ها به روی ما می گشاید.”
به این ترتیب گروهی از ربات ها با همکاری هم می توانند اشیای گم شده در زیر آب و یا نشت مواد شیمیائی را دیده بانی کنند. هر یک از ربات ها مجموعه خاصی از حسگرها را با خود حمل می کنند و با همکاری می توانند اطلاعات کاملی را در مورد حوادث در کوتاه ترین زمان جمع آوری کنند.
ریکاردو مارتینز، پژوهشگر دانشگاه پورتو می گوید: “ارتباط صوتی دستگاه ها بسیار شبیه حرف زدن انسان هاست. در حقیقت وسائل نقلیه زیر آب با استفاده از طیفی از فرکانس های صوتی که برای ما قابل شنیدن نیستند با هم صحبت می کنند.”
این زیردریایی های کوچک اطلاعات خود را به مرکز کنترل در روی زمین می فرستند. اطلاعاتی که شامل موقعیت دقیق خود آنها و برخی شاخص های زیست محیطی مانند درجه حرارت و ترکیب شیمیایی آب دریاست و روی صفحه نمایش قابل مشاهده است.
روبرتو پتروچا، پژوهشگر علوم کامپیوتر می گوید: “وسائل نقلیه متعددی در زیر آب به طور همزمان و در منطقه واحدی فعالیت می کنند و ما می توانیم همه آنها را از این مرکز کنترل کنیم. به آنها فرمان های مشخصی می دهیم مانند حرکت از نقطه A به نقطه B و حرکت آنها را در همان زمان کنترل می کنیم. برای ارتباط در زیر آب از امواج صوتی و در سطح آب از امواج رادیویی استفاده می کنیم.”
پوشش ضد آب این زیردریایی ها اجازه می دهد که تا عمق ۱۰۰ متری زیر آب بروند و بسته به ماموریت شان، ترکیب متفاوتی از داده ها را جمع آوری، ثبت و انتقال دهند.
ریکاردو مارتین: “مودم های صوتی که به زیردریایی ها امکان ارتباط در زیر آب می دهد، با خود حسگرهای زیست محیطی، سیستم های کامپیوتری، باتری های ۸ ساعته و امکان ارتباط رادیویی و ماهواره ای را به همراه دارند که امکان گشت زنی آنها در زیر آب را فراهم می کند.”
برای سونارهایی که به عملیات کشف و نجات اشیای غرق شده در زیر آب می پردازند، انتشار ضربان ها و علائم و پژواک های صوتی بسیار مهم است و اکنون در بندر پورتو کمک زیادی از این دستگاه ها دریافت می کنند.
لینو آنتونس، رئیس اداره حوادث اضطراری بندر پورتو می گوید: “این دستگاه ها برای سه کاربرد اصلی مفیدند: اول امنیت بندرها، دوم کنترل محیط زیست که برای ما بسیار مهم است و سوم بازرسی کشتی هایی که در بندر لنگر می اندازند.”
این زیر دریایی های کوچک در هر اقیانوس یا رودخانه ای که انجام ماموریت توسط غواص ها پر خطر و یا بسیار گران است، می توانند وارد عمل شوند. این تکنولوژی جدید می تواند به ما درک بهتری از جهان آرام زیر آب بدهد.
شیارا پتریولی: “این تکنولوژی درک بهتری از جهان در کشف آتشفشان ها و سایت های باستان شناسی زیر آب، حفاظت از سواحل، زیر ساخت ها و بنادر به ما می دهد و این از ضرورت های اساسی برای آینده بشریت است.”
منبع: یورونیوز
https://zistonline.com/vdca0an0.49now15kk4.html
zistonline.com/vdca0an0.49now15kk4.html
تگ ها
آخرین عناوین
پربيننده ترين







تمام حقوق محفوظ بوده و استفاده از مطالب
سایت با ذکر منبع بلامانع است.